epošta: info@strojnistvo.com
(C) 2001 - 2012 STROJNISTVO.com

Inženirji družbe NI so dokazali, da je dejansko mogoče uporabiti okolje LabVIEW in enoto LabVIEW Real-Time Module za izvedbo rešitev na osnovi strojne opreme COTS ter za upravljanje večjedrne računalniške obdelave za rezultate v realnem času.
Avtor:
Jason Spyromilio, Evropski južni observatorij
Panoga:
Raziskave, letalstvo/vesolje/avionika
Izdelki:
LabVIEW, Real-Time Module
Izziv:
Uporaba komercialnih večnamenskih (COTS) rešitev za visokozmogljivo računalniško obdelavo (HPC) pri krmiljenju aktivne in adaptivne optike pri izredno velikih teleskopih v realnem času
Rešitev:
Združevanje grafičnega programskega okolja NI LabVIEW z večjedrnimi procesorji za razvoj sistema za krmiljenje v realnem času, da bi dokazali, da tehnologija COTS omogoča krmiljenje optike evropskega Ekstremno velikega teleskopa (E-ELT), ki je trenutno v fazi načrtovanja in priprave prototipov.
"Inženirji družbe NI so dokazali, da je dejansko mogoče uporabiti okolje LabVIEW in enoto LabVIEW Real-Time Module za izvedbo rešitev na osnovi strojne opreme COTS ter za upravljanje večjedrne računalniške obdelave za rezultate v realnem času."
Evropski južni observatorij (ESO) je astronomska raziskovalna organizacija, ki jo podpira 13 evropskih držav. Imamo izkušnje pri razvoju in izvedbi najbolj izpopolnjenih teleskopov na svetu. Naša organizacija trenutno deluje na treh mestih v čilskih Andih - v opazovalnicah La Silla, Paranal in Chajnantor. Od nekdaj obvladujemo zelo inovativne tehnologije, od prvih sistemov za adaptivno optiko za običajne uporabnike na 3,6-metrskem teleskopu v opazovalnici La Silla preko izvedbe aktivne optike na 3,5-metrskem Teleskopu z novo tehnologijo (NTT) v opazovalnici La Silla do integriranega upravljanja Zelo velikega teleskopa (VLT) in z njim povezanega interferometra v opazovalnici Paranal. Poleg tega s partnerji iz Severne Amerike in Vzhodne Azije sodelujemo pri gradnji Velikega milimetrskega polja v Atacami (ALMA), teleskopa za podmilimetrske valovne dolžine s 66 antenami v vrednosti 1 milijarde USD, ki naj bi bil končan leta 2012 v opazovalnici Llano de Chajnantor.
Naslednji projekt na naših delovnih mizah je E-ELT. Zasnova za ta teleskop z glavnim zrcalom premera 42 m je v fazi B, zanjo pa je bilo že zagotovljenih 100 milijonov USD sredstev za predhodno zasnovo in pripravo prototipov. Po fazi B pričakujemo začetek gradnje konec leta 2010.
Aktivna in adaptivna optika v izredno velikem merilu
42-metrski teleskop izkorišča izkušnje ESO in astronomske skupnosti na področju aktivne ter adaptivne optike in segmentiranih zrcal. Aktivna optika vključuje kombinacijo tipal, aktuatorjev in krmilnega sistema, s katero teleskop vzdržuje pravilno obliko zrcala oziroma kolimacijo. S tem aktivno ohranjamo pravilno konfiguracijo teleskopa, da opravimo preostala popačenja v optiki in povečamo učinkovitost ter odpornost na napake. Ti teleskopi zahtevajo aktivne popravke optike vsako minuto noči, tako da so slike omejena le z atmosferskimi vplivi.
Adaptivna optika uporablja podobno metodologijo za nadzor atmosferskih učinkov, ki jih več stokrat na sekundo popravi s spreminjanjem oblike primernega tankega zrcala. Velikost turbulenc določa število aktuatorjev na teh zrcalih, ki lahko spreminjajo obliko. Tipala valovne fronte zelo hitro vzorčijo atmosferska popačenja in jih pretvorijo v ukaze za zrcala. To zahteva zelo hitro strojno in programsko opremo.
Krmiljenje tako kompleksnega sistema zahteva ogromne zmogljivosti računalniške obdelave podatkov. V preteklosti smo sisteme krmilili z lastnimi krmilnimi sistemi, ki so temeljili na krmiljenju v realnem času v navideznih strojnih okoljih (VME), kar je lahko drago in zamudno. Zdaj v sodelovanju z inženirji družbe National Instruments pripravljamo ocene zmogljivosti krmilnega sistema za glavno segmentirano zrcalo teleskopa E-ELT, ki mu pravimo M1 in je izdelan s programsko in strojno opremo COTS. Skupaj raziskujemo tudi možne rešitve COTS za krmiljenje adaptivnega zrcala teleskopa, imenovanega M4, v realnem času.
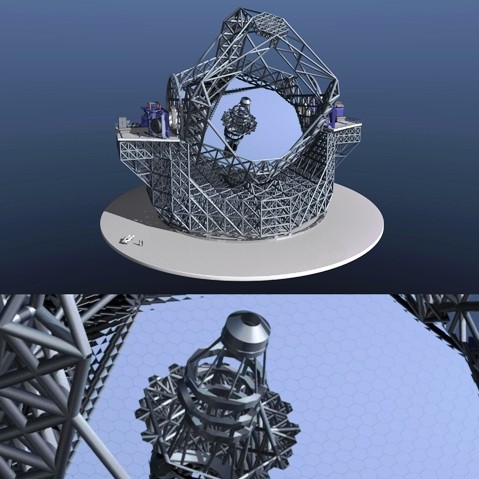
Slika 1
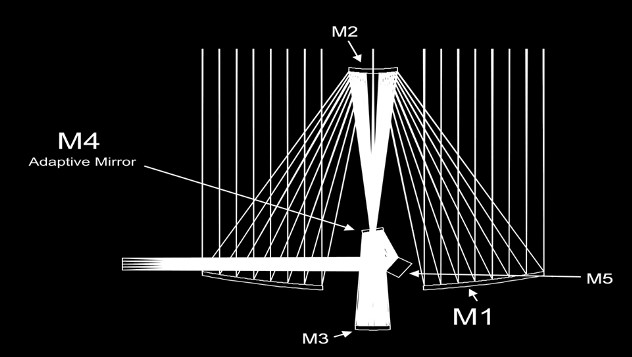
M1 je segmentirano zrcalo, ki ga sestavlja 984 šestkotnih zrcal (slika 1), od katerih vsako tehta skoraj 150 kg in ima premer od 1,5 do 2 m, tako da znaša skupni premer 42 m. To lahko primerjamo z glavnim zrcalom Hubblovega vesoljskega teleskopa, ki ima premer 2,4 m. Že glavno zrcalo teleskopa E-ELT bo štirikrat večje od katerega koli optičnega teleskopa na Zemlji, skupno pa je sestavljen iz petih zrcal (slika 2).
Določitev izrednih zahtev za računalniško obdelavo, ki jih mora izpolniti krmilni sistem
Sistem, ki ga krmili programska oprema LabVIEW, mora brati podatke iz tipal, da določi položaje segmentov zrcala, in - ob premiku segmentov - segmente znova izravnati z aktuatorji. Okolje LabVIEW mora za to izračunati vektorski produkt matrike velikosti 3.000 x 6.000 celic z vektorjem s 6.000 celicami, kar mora za zagotavljanje učinkovitega nastavljanja zrcala ponoviti od 500- do 1000-krat na sekundo.
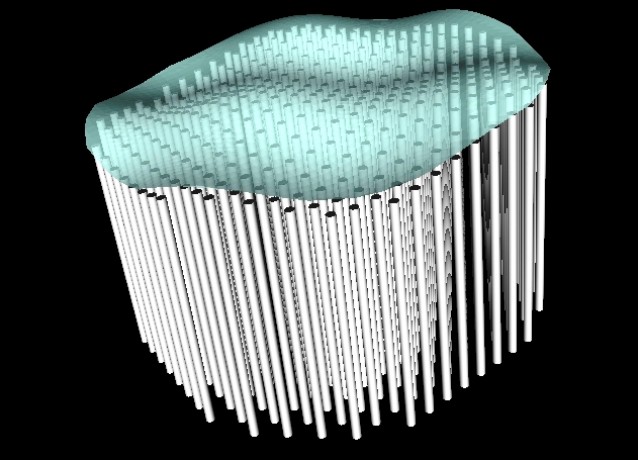
Tipala in aktuatorji krmilijo tudi adaptivno zrcalo M4. To je manjše tanko zrcalo, ki lahko spreminja obliko. Njegov premer znaša 2,5 m, njegovo obliko pa določa več kot 8.000 aktuatorjev (slika 4). Tehnični izziv je podoben kot pri aktivnem krmiljenju zrcala M1, le da moramo namesto ohranjanja obliko spreminjati na osnovi izmerjenih podatkov slike valovne fronte. Podatki valovne fronte se preslikajo v vektor s 14.000 vrednostmi, 8.000 aktuatorjev pa moramo posodobiti vsakih nekaj milisekund, kar pomeni računanje vektorskega produkta krmilne matrike velikosti 8.000 x 14.000 celic z vektorjem s 14.000 celicami. Če ta izziv zaokrožimo na 9.000 x 15.000 celic, pomeni to približno 15-kratnik računske moči, ki je potrebna za krmiljenje velikega segmentiranega zrcala M1.
Z družbo NI smo že sodelovali na področju zajemanja in sinhronizacije podatkov z velikim številom kanalov, ko so se lotili izziva matematike in krmiljenja. Inženirji družbe NI simulirajo postavitev in zasnovo krmilne matrike ter krmilne zanke. V središču vseh teh dejavnosti je zelo velika matrično-vektorska funkcija LabVIEW, ki izvaja večino izračunov. Krmiljenje zrcal M1 in M4 zahteva ogromno računsko zmogljivost, kar bomo rešili z uporabo več večjedrnih sistemov. Krmiljenje M4 predstavlja 15 izračunov podmatrik s 3.000 x 3.000 celicami, zato potrebujemo 15 naprav, ki vsebujejo čim večje število jeder. Zato mora krmilni sistem upravljati večjedrno obdelavo. Okolje LabVIEW ponuja to zmogljivost z rešitvami COTS, zato predstavlja zelo privlačno rešitev te težave.
Rešitev težave z okoljem LabVIEW in funkcijo za večjedrni način HPC
Ker smo morali načrtovanje krmilnega sistema opraviti pred samo gradnjo teleskopa E-ELT, bi lahko konfiguracija sistema vplivala na nekatere značilnosti gradnje teleskopa. Ključnega pomena je bilo temeljito preizkušanje rešitve, kot da bi teleskop že deloval. S tem izzivom so se inženirji družbe NI soočili tako, da so izvedli krmilni sistem, poleg tega pa še sistem, na katerem se izvaja simulacija zrcala M1 v realnem času, kar omogoča izvedbo preizkusa krmilnega sistema z vključeno strojno opremo (HIL). Način preizkušanja HIL se pogosto uporablja pri načrtovanju v avtomobilski in letalski industriji za potrjevanje krmilnikov s točnim simulatorjem, ki deluje v realnem času. Inženirji družbe NI so ustvarili simulator zrcala M1, ki se odziva na signale krmilnega sistema in tako potrjuje njegovo delovanje. Ekipa NI je razvila krmilni sistem in simulacijo zrcala v okolju LabVIEW, nato pa jih je izvedla na večjedrnem osebnem računalniku, na katerem se izvaja LabVIEW Real-Time Module, kar zagotavlja deterministično izvajanje.
V podobnih aplikacijah HPC za izvajanje v realnem času so komunikacijske in računske naloge tesno povezane. Odpovedi komunikacijskega sistema pomenijo odpoved celotnega sistema. Zaradi tega se skozi celoten postopek razvoja aplikacije načrtuje tudi medsebojno sodelovanje komunikacije in računanja. Inženirji družbe NI so za jedro sistema potrebovali hitro in deterministično izmenjavo podatkov, zato so kmalu ugotovili, da standardno omrežje Ethernet ni primerno, saj uporablja nedeterministični omrežni protokol. Za izmenjavo podatkov med krmilnim sistemom in simulatorjem zrcala M1 so uporabili funkcijo časovno proženega omrežja v sistemu LabVIEW Real-Time Module, ki omogoča determinističen prenos podatkov s hitrostjo 36 MB/s.
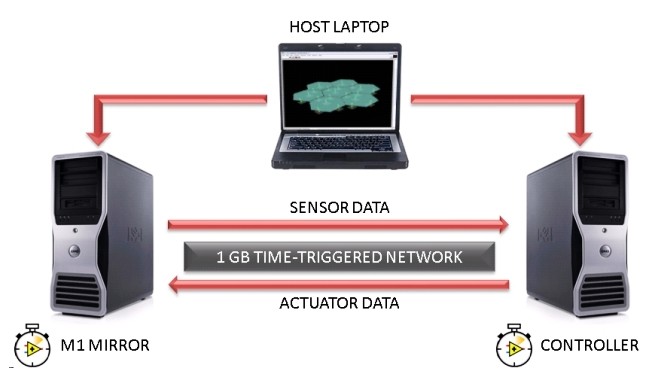
Družba NI je razvila celotno rešitev za zrcalo M1, ki vključuje dve delovni postaji Dell Precision T7400 (vsaka ima po osem jeder) in prenosnik, ki predstavlja vmesnik za uporabnika. Vključuje dve omrežji - standardno, ki oba sistema za izvajanje v realnem času povezuje s prenosnikom, in časovno proženo omrežje 1 GB Ethernet med sistemoma za izvajanje v realnem času, preko katere se izmenjujejo V/I-podatki.
Ko smo preverjali zmogljivost sistema, smo ugotovili, da krmilnik v vsaki zanki prejme 6.000 vrednosti iz tipa, izvede krmilni algoritem za izravnavo segmentov in odda 3.000 vrednosti za aktuatorje. Ekipa NI je ustvarila krmilni sistem, ki dosega te rezultate, in izvedla simulacijo delovanja teleskopa v realnem času, ki ji pravimo "zrcalo". Zrcalo prejme 3.000 izhodov za pogone, jim prišteje spremenljivko, ki predstavlja atmosferske motnje, kot je veter, izvede krmilni algoritem za simulacijo zrcala M1 in odda 6.000 vrednosti tipal, da zaključi zanko. Celotna krmilna zanka se izvede v manj kot 1 ms, da je zagotovljeno primerno krmiljenje zrcala (slika 6).
Končni rezultati, ki so jih inženirji NI izmerili za svoje izračune z matrikami in vektorji:
M4 kompenzira izmerjena popačenja valovne fronte v atmosferi, inženirji NI pa so ugotovili, da je to mogoče izvesti samo z najsodobnejšim sistemom z večjedrnimi strežniškimi rezinami. Dell je povabil ekipo, da je rešitev preizkusila na njegovem sistemu M1000 s 16 strežniškimi rezinami, rezultati pa so bili spodbudni. Vsaka izmed strežniških rezin sistema M1000 ima po osem jeder, kar pomeni, da so lahko inženirji krmiljenje razdelili na 128 jeder.
Inženirji družbe NI so dokazali, da je dejansko mogoče uporabiti okolje LabVIEW in enoto LabVIEW Real-Time Module za izvedbo rešitev na osnovi strojne opreme COTS ter za upravljanje večjedrne računalniške obdelave za rezultate v realnem času. Zaradi tega preboja na področju zmogljivosti naša ekipa pri projektu E-ELT še naprej postavlja nove mejnike na področju informatike in astronomije, kar bo prispevalo k napredku vse znanosti.
National Instruments,
Instrumentacija, avtomatizacija in upravljanje procesov d.o.o.
Kosovelova ulica 15, 3000 Celje, Slovenija
Tel: + 386 3 425 4200, Fax: +386 3 425 4212
E-mail: ni.slovenia@ni.com
www.ni.com/slovenia
HR, MC, BA, RS, ME: + 386 3425 4200
SLO: 080 080 844



